Away Team Droid Tech: Martian Exploration of Lava Tubes (MELT) with ReachBot: Scientific Investigation and Concept of Operations
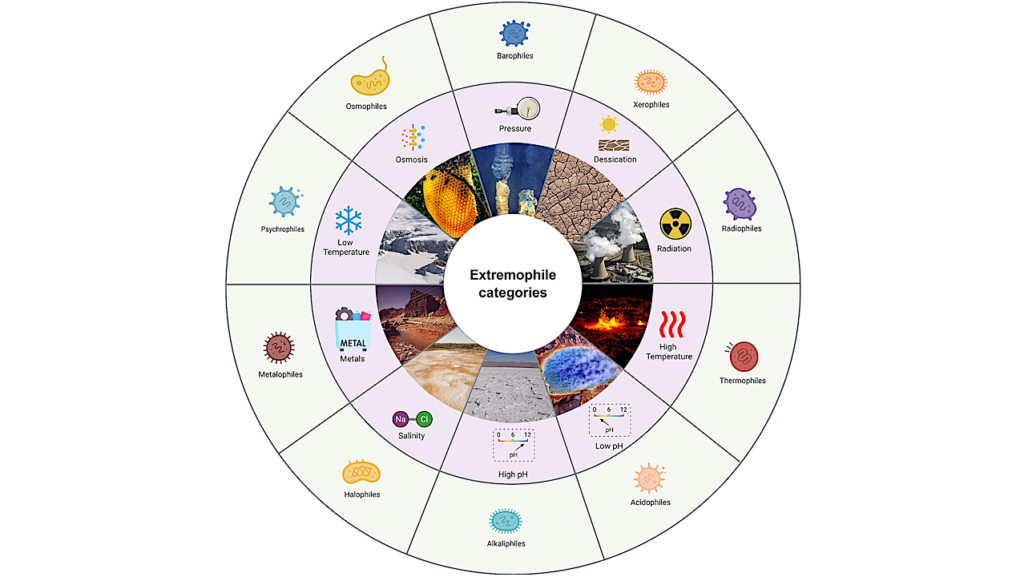
As natural access points to the subsurface, lava tubes and other caves have become premier targets of planetary missions for astrobiological analyses.
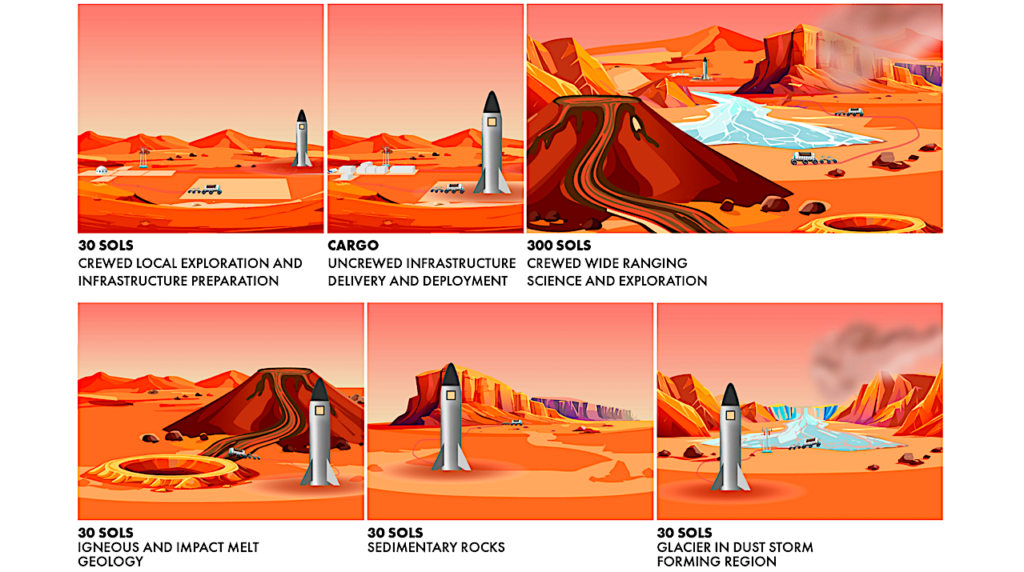
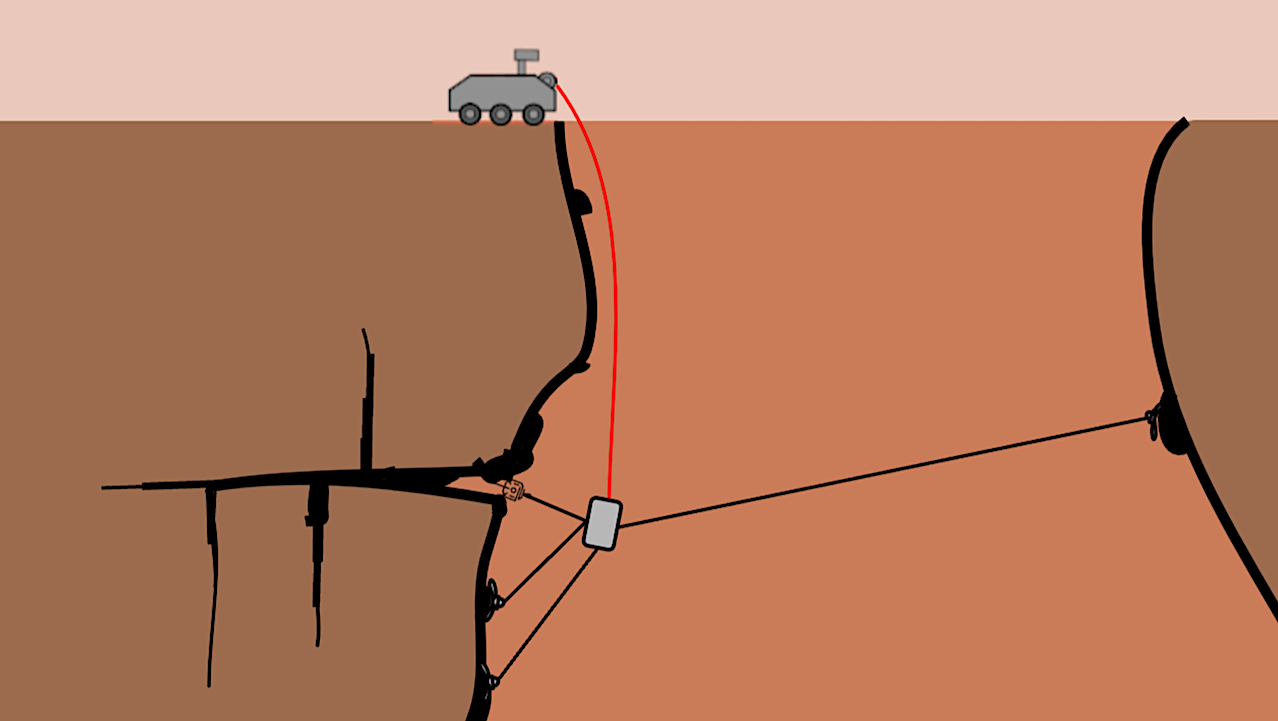
Few existing robotic paradigms, however, are able to explore such challenging environments. ReachBot is a robot that enables navigation in planetary caves by using extendable and retractable limbs to locomote. This paper outlines the potential science return and mission operations for a notional mission that deploys ReachBot to a martian lava tube.
In this work, the motivating science goals and science traceability matrix are provided to guide payload selection. A Concept of Operations (ConOps) is also developed for ReachBot, providing a framework for deployment and activities on Mars, analyzing mission risks, and developing mitigation strategies

(From left to right) ReachBot first deploys from the mothercraft, entering a lava tube via skylight by using a boom in tension on the opposing rock face; next, it reaches a scientifically-valuable area and collects spectroscopy measurements; it then uses remote imaging to inform navigation. — cs.RO
Julia Di, Sara Cuevas-Quinones, Stephanie Newdick, Tony G. Chen, Marco Pavone, Mathieu G. A. Lapotre, Mark Cutkosky
Comments: In International Conference on Space Robotics 2024
Subjects: Robotics (cs.RO)
Cite as: arXiv:2406.13857 [cs.RO] (or arXiv:2406.13857v1 [cs.RO] for this version)
https://doi.org/10.48550/arXiv.2406.13857
Focus to learn more
Submission history
From: Julia Di
[v1] Wed, 19 Jun 2024 21:34:58 UTC (1,530 KB)
https://arxiv.org/abs/2406.13857
Astrobiology, Astrogeology, robotics,