Away Team Droid Tech: Scientific Exploration of Challenging Planetary Analog Environments with a Team of Legged Robots
The interest in exploring planetary bodies for scientific investigation and in-situ resource utilization is ever-rising. Yet, many sites of interest are inaccessible to state-of-the-art planetary exploration robots because of the robots’ inability to traverse steep slopes, unstructured terrain, and loose soil.
Additionally, current single-robot approaches only allow a limited exploration speed and a single set of skills.
Here, we present a team of legged robots with complementary skills for exploration missions in challenging planetary analog environments. We equipped the robots with an efficient locomotion controller, a mapping pipeline for online and post-mission visualization, instance segmentation to highlight scientific targets, and scientific instruments for remote and in-situ investigation.
Furthermore, we integrated a robotic arm on one of the robots to enable high-precision measurements. Legged robots can swiftly navigate representative terrains, such as granular slopes beyond 25 degrees, loose soil, and unstructured terrain, highlighting their advantages compared to wheeled rover systems. We successfully verified the approach in analog deployments at the BeyondGravity ExoMars rover testbed, in a quarry in Switzerland, and at the Space Resources Challenge in Luxembourg.
Our results show that a team of legged robots with advanced locomotion, perception, and measurement skills, as well as task-level autonomy, can conduct successful, effective missions in a short time. Our approach enables the scientific exploration of planetary target sites that are currently out of human and robotic reach.

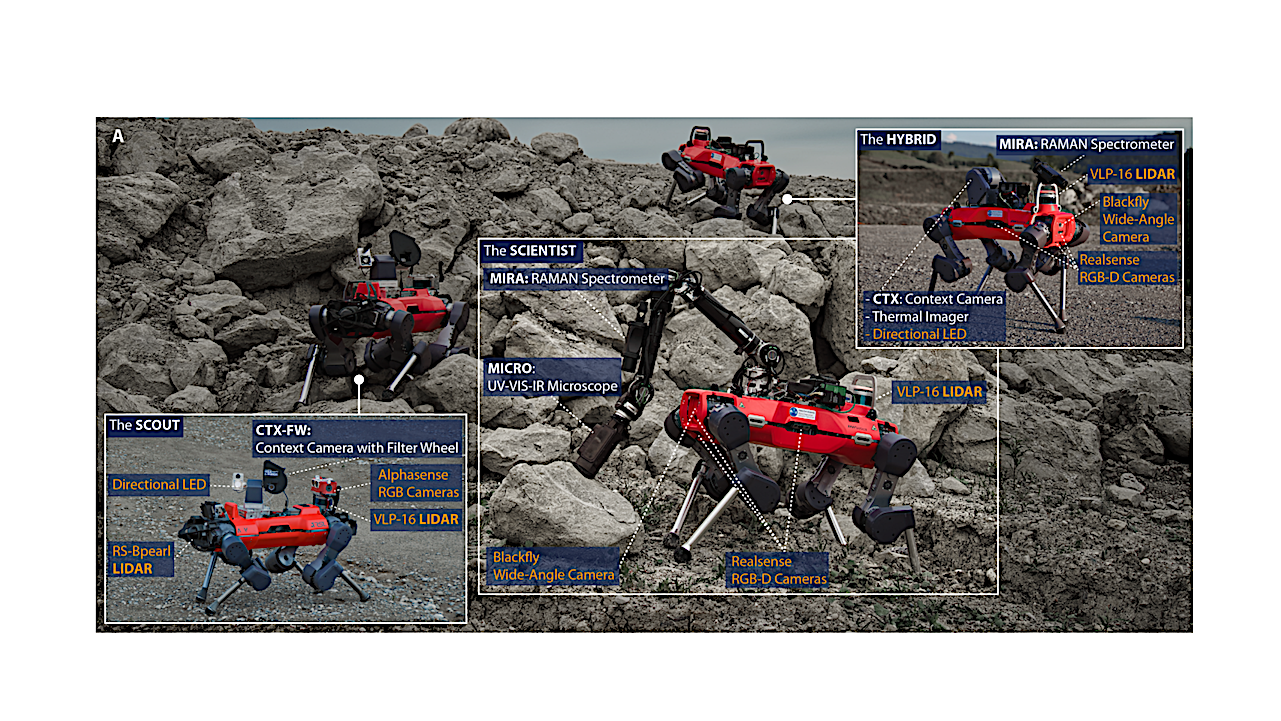
System architecture of our team of legged robots. (A) Robotic and scientific payloads on the Scout, Scientist, and Hybrid. Robotic payloads and scientific payloads are labeled in orange and white, respectively. (B) High-level overview of the software architecture of our system. With a balanced combination of shared and specialized modules per robot, we designed a safe yet efficient multirobot system. — cs.RO

Performance of our team of legged robots during the SRC. (A) Overview of the competition area. (B) Postprocessed high-resolution map of the exploration area and the associated path of the Scout. The region in the blue dotted box corresponds to (C). (C) Online mesh map of the Scout for target identification. (D) Postprocessed high-resolution height map and scientific acquisition paths of the Hybrid and the Scientist. (a and b) Thermal images acquired during the SRC. (c) Example of the rock instance segmentation of a Navcam image. (d) Example of the rock instance segmentation of a CTX image. (E) Example of a panorama image with rock instance segmentation acquired during the SRC. (F) Mission summary of the SRC. — cs.RO
Philip Arm, Gabriel Waibel, Jan Preisig, Turcan Tuna, Ruyi Zhou, Valentin Bickel, Gabriela Ligeza, Takahiro Miki, Florian Kehl, Hendrik Kolvenbach, Marco Hutter
Subjects: Robotics (cs.RO); Systems and Control (eess.SY)
Cite as: arXiv:2307.10079 [cs.RO] (or arXiv:2307.10079v1 [cs.RO] for this version)
https://doi.org/10.48550/arXiv.2307.10079
Focus to learn more
Journal reference: Science Robotics 2023 Vol. 8, Issue 80, eade9548
Related DOI:
https://doi.org/10.1126/scirobotics.ade9548
Focus to learn more
Submission history
From: Philip Arm
[v1] Wed, 19 Jul 2023 15:51:55 UTC (27,341 KB)
https://arxiv.org/abs/2307.10079
Astrobiology,