The Phylogenetic Context For The Origin Of A Unique Purple-green Photosymbiosis
Symbioses are widespread in nature and have been the source of much evolutionary innovation. While some types of symbioses evolved multiple times across space and time (e.g., oxygenic photosymbioses or chemosymbioses), others are extremely rare. Purple photosymbioses are an example of such rare associations.
Only two purple photosymbioses between heterotrophic eukaryotes and intracellular purple bacteria have been documented. This is in stark contrast to very common oxygenic photosymbioses and poses the question of what factors prevent the more frequent establishment of purple photosymbioses. To shed light on this question, we investigated the evolutionary history of the purple-green ciliate Pseudoblepharisma tenue (Spirostomidae) using a phylogenetic and comparative approach.
We sampled about 30 new isolates of spirostomid ciliates, inferred a comprehensive and well-supported phylogenomic tree, and resolved the sister relationship between Pseudoblepharisma and Spirostomum. Furthermore, we characterized P. tenue’s sister species, here renamed Pseudoblepharisma chlorelligera, and revealed that it constitutes a quadripartite symbiosis between a ciliate, a green alga, and two different non-photosynthetic bacteria.
In addition, we discovered three colorless, non-photosymbiotic Pseudoblepharisma species, which branch as sister to the photosymbiotic P. tenue and P. chlorelligera.
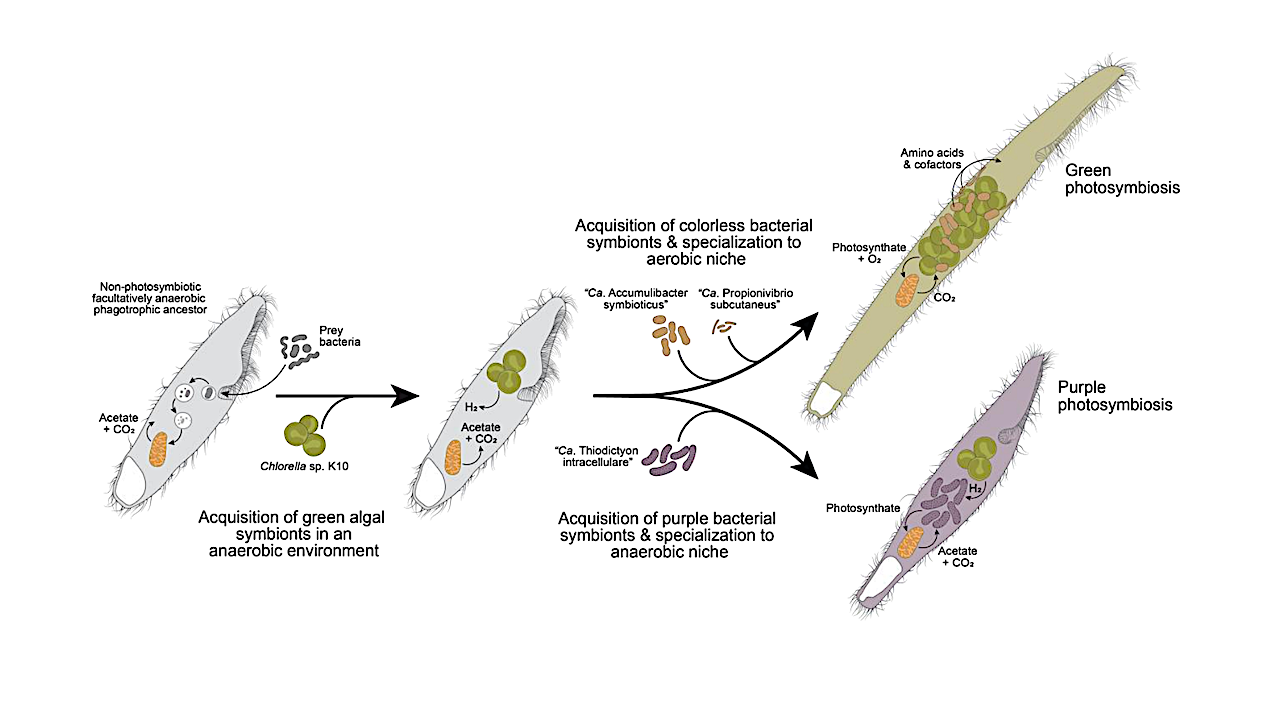
Our phylogenetic and comparative genomic analyses suggest that the green algal symbionts of P. tenue predated the acquisition of purple bacterial symbionts, and that the ancestor of the extant Pseudoblepharisma species was non-photosymbiotic and facultatively anaerobic.
These data allowed us to hypothesize on the evolutionary steps that led to the origin of P. tenue and thus bring us closer to explaining the conditions that led to the evolutionary emergence of a unique purple-green symbiosis.
The phylogenetic context for the origin of a unique purple-green photosymbiosis, biorxiv.org
Astrobiology,