Away Team Droid Tech: Towards Automated Sample Collection and Return in Extreme Underwater Environments
In this report, we present the system design, operational strategy, and results of coordinated multi-vehicle field demonstrations of autonomous marine robotic technologies in search-for-life missions within the Pacific shelf margin of Costa Rica and the Santorini-Kolumbo caldera complex, which serve as analogs to environments that may exist in oceans beyond Earth.
This report focuses on the automation of ROV manipulator operations for targeted biological sample-collection-and-return from the seafloor. In the context of future extraterrestrial exploration missions to ocean worlds, an ROV is an analog to a planetary lander, which must be capable of high-level autonomy.
Our field trials involve two underwater vehicles, the SuBastian ROV and the Nereid Under Ice (NUI) hybrid ROV for mixed initiative (i.e., teleoperated or autonomous) missions, both equipped 7-DoF hydraulic manipulators.
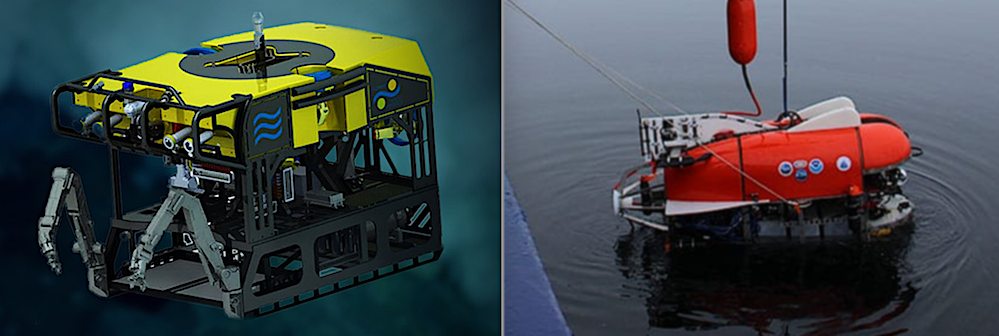
[L] Remotely Operated Vehicle (ROV SuBastian) depth rated to 4,500 meters with research capabilities for use on R/V Falkor (too). The ROV is outfitted with a suite of sensors and scientific equipment to support scientific data and sample collection, as well as interactive research, experimentation, and technology development. — Schmidt Ocean Institute [R] Nereid Under Ice two-body system deployment from the Polarstern during August 2014 sea trials. The mated-depressor and tow-body are lifted above the vehicle to facilitate a single point lift. (Chris German, Woods Hole Oceanographic Institution)

The fisheye imagery collected during the Costa Rica cruise was processed into a stand-alone dataset (Billings and Johnson-Roberson, 2020). The images are annotated with the bounding box and sixDoF pose of the tool handles placed in the workspace. The top row (a) shows sample raw fisheye images from different sequences of the dataset, and the bottom row (b) shows sample annotations from a single sequence in the dataset. The images are center rectified here only for purposes of visualization. — cs.RO
We describe an adaptable, hardware-independent computer vision architecture that enables high-level automated manipulation. The vision system provides a 3D understanding of the workspace to inform manipulator motion planning in complex unstructured environments.
We demonstrate the effectiveness of the vision system and control framework through field trials in increasingly challenging environments, including the automated collection and return of biological samples from within the active undersea volcano, Kolumbo. Based on our experiences in the field, we discuss the performance of our system and identify promising directions for future research.
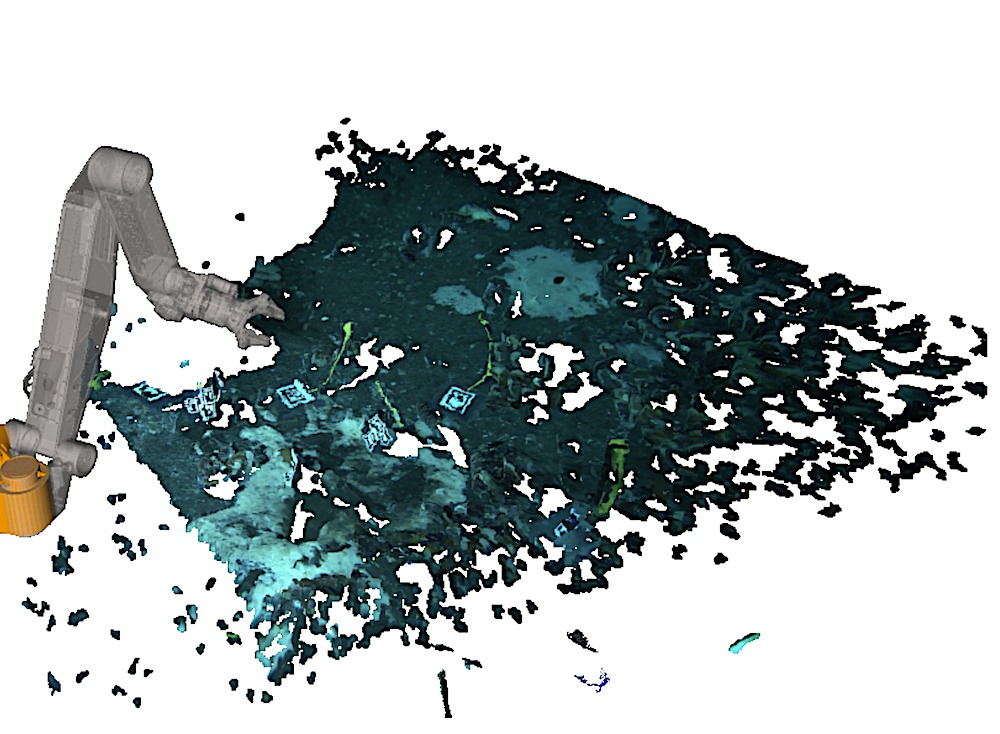
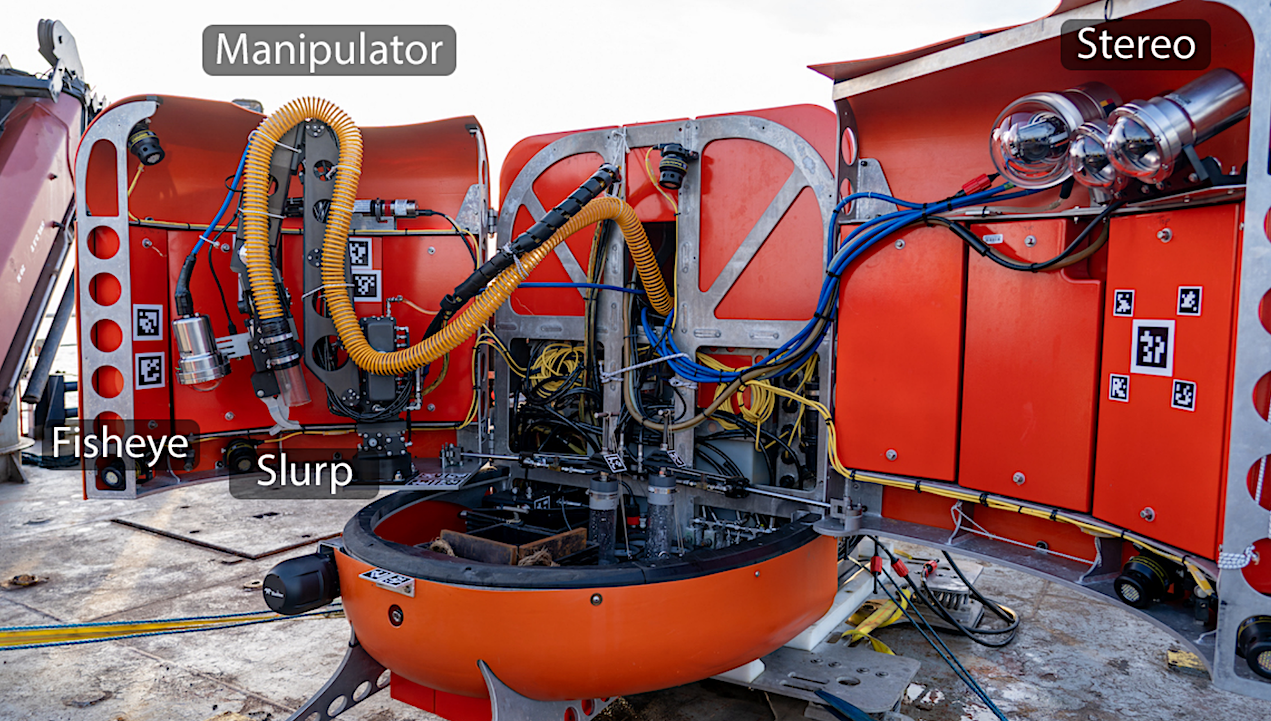
The vision system was integrated on the SuBastian ROV operated by Schmidt Ocean Institute, where we demonstrated real-time visualization of the planning scene with a Schilling Titan-4 manipulator and the projected stereo point clouds. This also demonstrates the flexibility of the system to be integrated with different vehicles and manipulators. — cs.RO
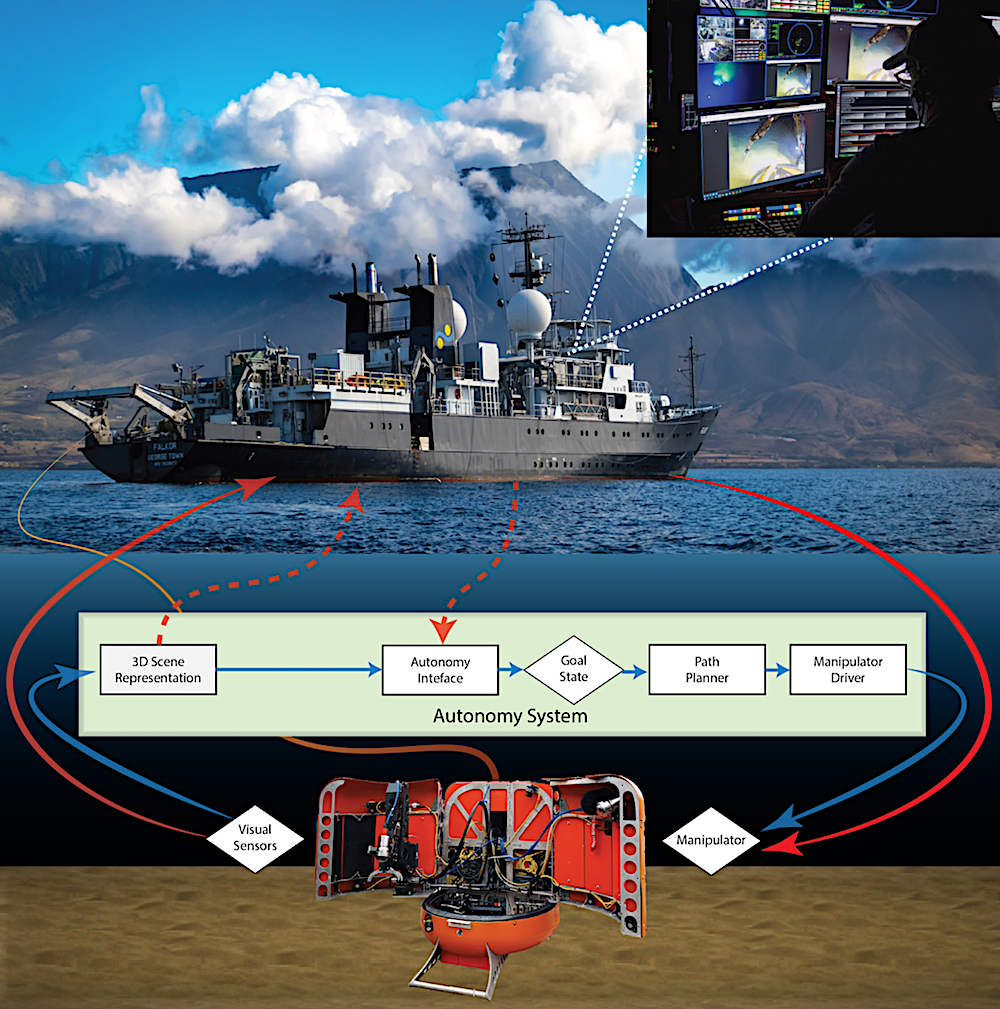
Conceptual graphic of the our control system for an underwater intervention vehicle. The autonomy system runs on a topside desktop computer with visual sensor data and manipulator coms streamed over a high bandwidth tether from the vehicle. Solid red flow lines represent standard teleoperated control from a surface ship. Blue flow lines represent our automated system. Red dashed lines represent interfacing between the pilot and the autonomous system, where, in this work, the pilot acts as the high level task planner and interfaces with the automated system through a graphical scene representation and task level controller. Eventually, the pilot would be replaced with an automated mission planner that could issue high level tasks. — cs.RO
Gideon Billings, Matthew Walter, Oscar Pizarro, Matthew Johnson-Roberson, Richard Camilli
Comments: 36 pages, 23 figures, accepted to Field Robotics
Subjects: Robotics (cs.RO); Systems and Control (eess.SY)
Cite as: arXiv:2112.15127 [cs.RO] (or arXiv:2112.15127v1 [cs.RO] for this version)
https://doi.org/10.48550/arXiv.2112.15127
Focus to learn more
Submission history
From: Gideon Billings
[v1] Thu, 30 Dec 2021 16:51:25 UTC (14,102 KB)
https://arxiv.org/abs/2112.15127
Astrobiology, oceanography,