Away Team Droid Tech: Multi-Objective Global Path Planning for Lunar Exploration With a Quadruped Robot
In unstructured environments the best path is not always the shortest, but needs to consider various objectives like energy efficiency, risk of failure or scientific outcome.
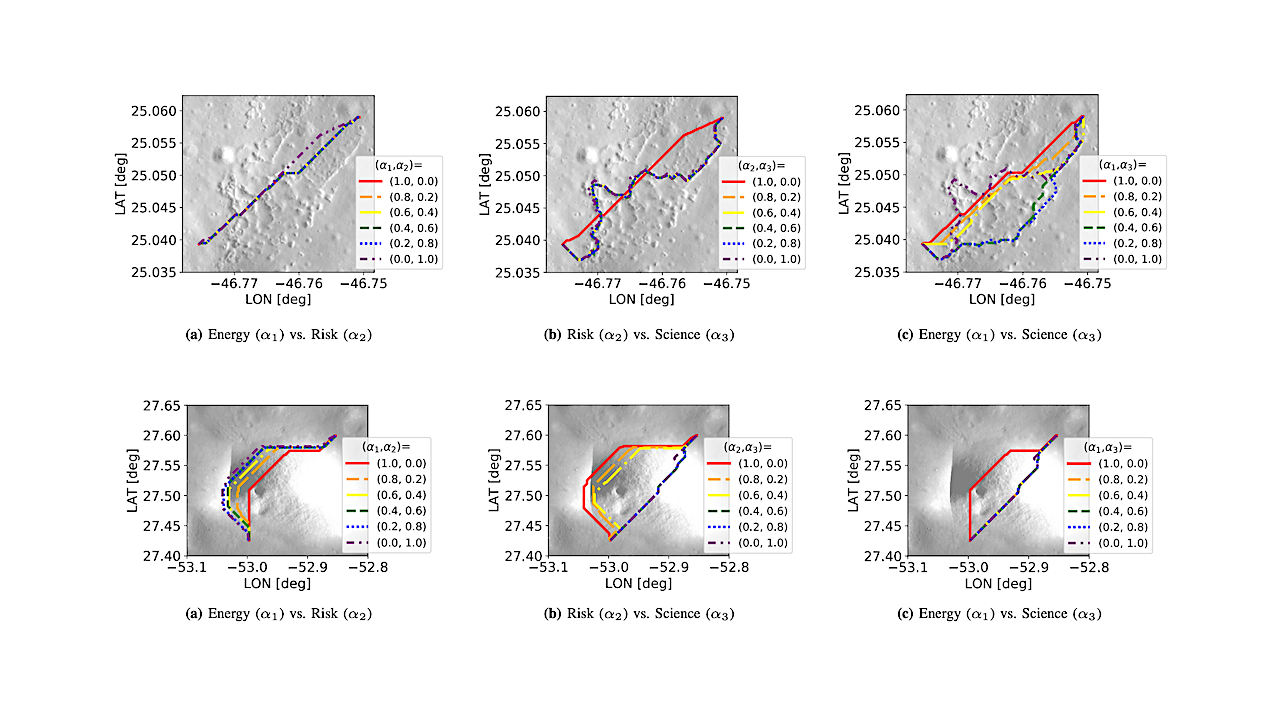
This paper proposes a global planner, based on the A* algorithm, capable of individually considering multiple layers of map data for different cost objectives. We introduce weights between the objectives, which can be adapted to achieve a variety of optimal paths. In order to find the best of these paths, a tool for statistical path analysis is presented.
Our planner was tested on exemplary lunar topographies to propose two trajectories for exploring the Aristarchus Plateau. The optimized paths significantly reduce the risk of failure while yielding more scientific value compared to a manually planned paths in the same area. The planner and analysis tool are made open-source in order to simplify mission planning for planetary scientists.
Julia Richter, Hendrik Kolvenbach, Giorgio Valsecchi, Marco Hutter
Comments: 8 pages, 19 figures, IEEE conference iSpaRo 2024
Subjects: Robotics (cs.RO)
Cite as: arXiv:2406.16376 [cs.RO] (or arXiv:2406.16376v1 [cs.RO] for this version)
https://doi.org/10.48550/arXiv.2406.16376
Focus to learn more
Submission history
From: Julia Richter
[v1] Mon, 24 Jun 2024 07:38:53 UTC (2,149 KB)
https://arxiv.org/abs/2406.16376
Astrobiology,