Astrobiology Droid Traverse Planning Via Open Science Mars Mapping
Combining images from orbit with images from the surface, a JPL-developed tool allows researchers to zoom in to see individual boulders and zoom out to see all of Mars.
Mars rovers can only make exciting new discoveries thanks to human scientists making careful decisions about their next stop. The Mars 2020 mission is aimed at exploring the geology of Jezero Crater and seeking signs of ancient microbial life on Mars using the Perseverance rover. Scientists at NASA’s Jet Propulsion Laboratory in Southern California used novel mapping techniques to direct both the rover and the flights of the Ingenuity helicopter, which rode to Mars on Perseverance — and they did it all with open-source tools.
JPL mapping specialists Dr. Fred Calef III and Dr. Nathan Williams used geospatial analysis to help the scientific community and NASA science leadership select Jezero Crater as the landing site for Perseverance and Ingenuity. Before the vehicles arrived on Mars, they helped create maps of the terrain using data from orbiting satellites.
“Maps and images are a common language between different people — scientists, engineers, and management,” Williams said. “They help make sure everyone’s on the same page moving forward, in a united front to achieve the best science that we can.”
After the mission touched down on Mars in February 2021, the Ingenuity helicopter opportunistically scouted ahead to take photos. The team then generated more detailed maps from both rover and helicopter image data to help plan the Perseverance rover’s path and science investigations.
To enable this full-scale mapping of Mars, Calef created the Multi-Mission Geographic Information System (MMGIS), an open-source web-based mapping interface. Online demos of the software, pre-loaded with Mars imagery taken from orbit, allow visitors to explore the paths of Perseverance, Ingenuity, and the Curiosity rover, a sister Mars mission that landed in 2012.
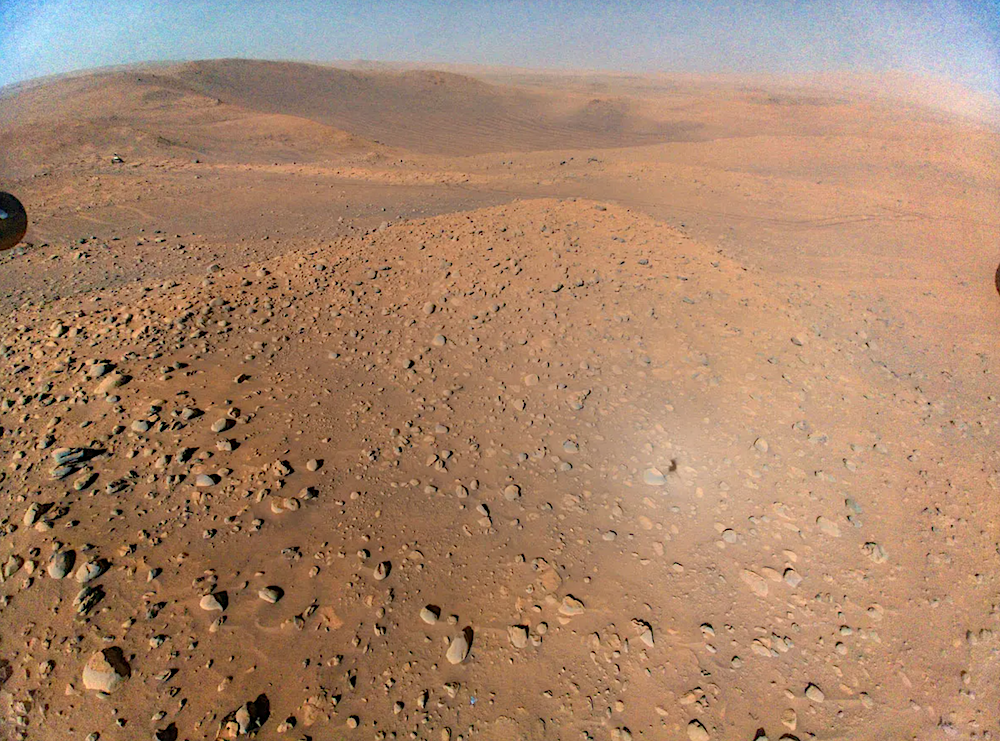
This image of NASA’s Perseverance Mars rover at the rim of Belva Crater was taken by the agency’s Ingenuity Mars Helicopter during the rotorcraft’s 51st flight on April 22, 2023. The rover is in the upper left of the image, parked at a light-toned rocky outcrop. NASA/JPL-Caltech
The open nature of the software was key to the mission’s success. “We have people literally all over the world who are working on the mission, and we need to be able to give them fast and quick access to software and data,” Calef said.
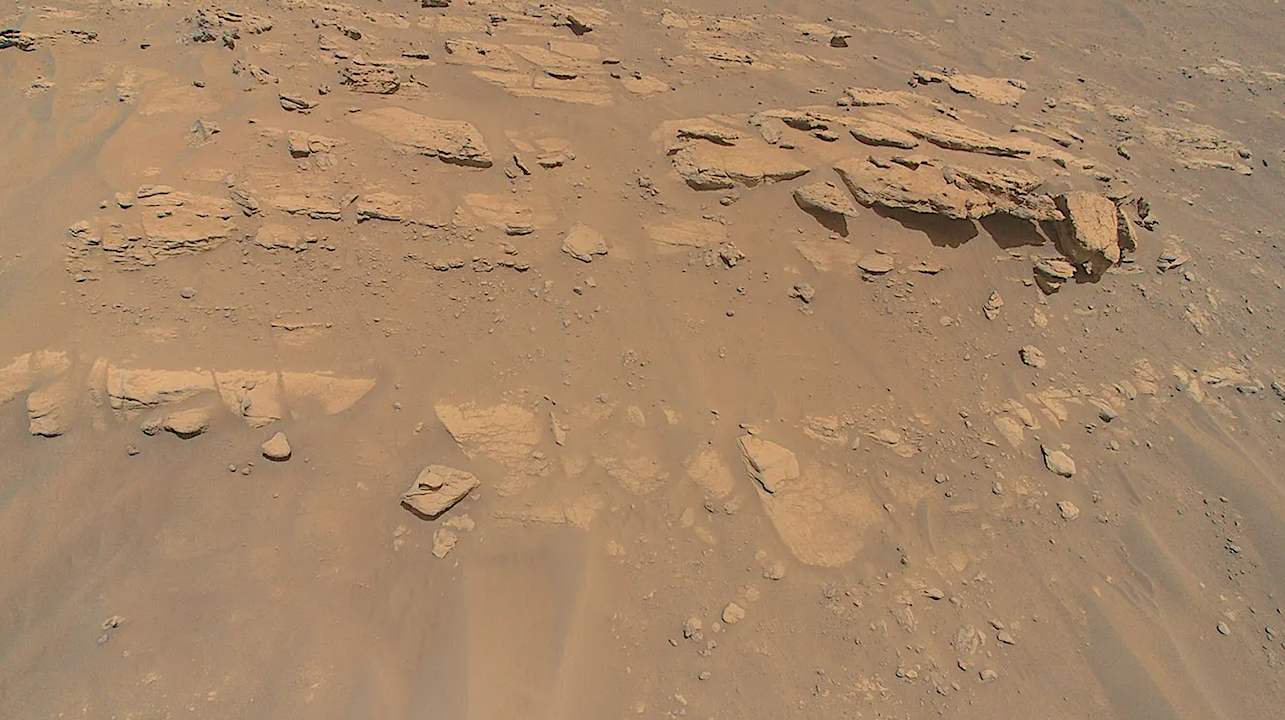
MMGIS aimed to help people understand the full scope of Martian geography. By combining images from orbit and augmenting with images from Perseverance and Ingenuity, the JPL team allows researchers to zoom in to see individual boulders and zoom out to see all of Mars. This variety of viewpoints gives the team a sense of scale and context to properly understand the landscape around the Perseverance rover, and how to optimally achieve their science goals within the available terrain.
The impact of the tools developed by the JPL team went beyond the Mars 2020 mission. The team wanted their software to help other researchers easily visualize their data without needing to be data visualization experts themselves. Thanks to this open-source approach, other teams have now used MMGIS to map Earth and other planetary bodies.
In keeping with this open philosophy, the images taken by Perseverance and Ingenuity over the course of the Mars 2020 mission are freely available to the public. By sharing these data with the rest of the world, the results from the mission can be used to educate, inspire, and enable further research.
As Mars scientists look to the future, with the Perseverance rover team deploying even more advanced tools powered by AI, open science will pave the way for further exploration. JPL is now working on designs for potential future Mars helicopters that are far more capable and complex than Ingenuity. Payload mass, flight range, and affordability are at the forefront of their minds.
Existing open-source tools will help address those concerns. Not only are open-source applications free to use, but the large amount of collaboration in creating and testing them means that they’re often highly reliable.
Ultimately, the JPL team views its work as part of the cycle of open science, using open tools to make its job easier while also developing new features in the tools for others to use in the future. “Every mission is contributing back to the other missions and future missions in terms of new tools and techniques to develop,” Calef said. “It’s not just you working on something. It’s being able to share data between people … getting a higher order of science.”
Multi-Mission Geographic Information System
Astrobiology, Astrogeology,