NIAC 2020 Phase II Selection: Enceladus Vent Explorer
Enceladus Vent Explorer (EVE) is a robotic mission to enter an Enceladus. Her mission objective is to collect samples of ocean water that could contain intact organisms (i.e., cells) to i) draw an unambiguous conclusion on the existence of life in the ocean of Enceladus and ii) should a positive result be obtained, characterize the life and ecosystem of Enceladus through biochemical, taxonomic, ethological, and ecological studies.
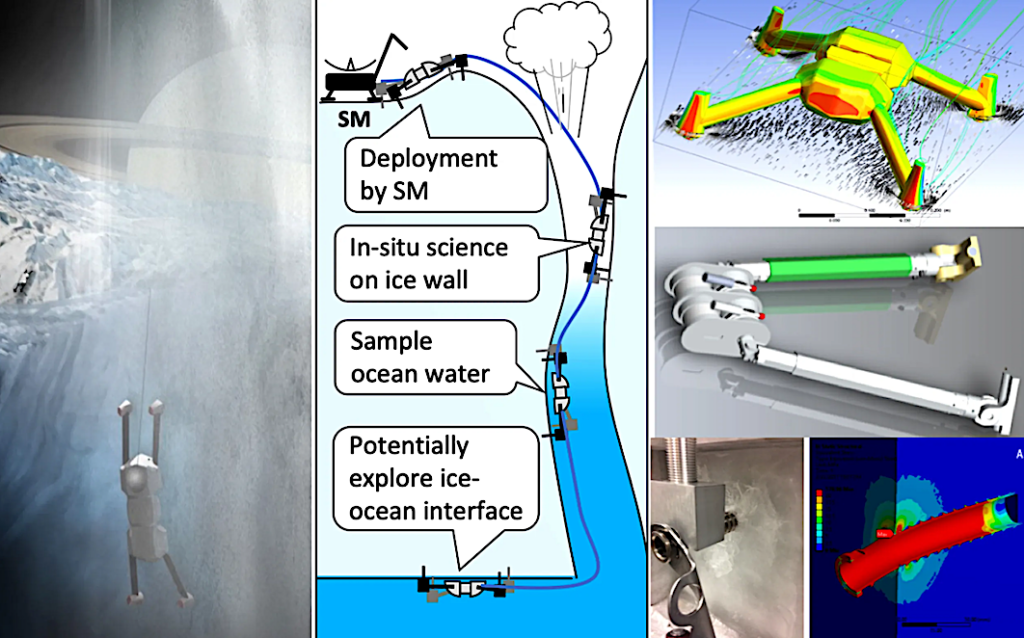
The EVE mission will send two types of modules: Surface Module (SM) and Descent Module (DM). SM is a lander that lands within a few hundred meters from the entrance of an erupting vent. After a successful landing, it deploys a single or multiple DMs.
First, DMs move to a vent and descend into it. Then they perform in-situ science investigations in the vent using miniaturized instruments such as a microscopic imager and a microfluidics chip.
Finally, it collects ocean water and/or ice particles in the vent and delivers them to instruments on the SM such as a mass spectrometer for detailed chemical analysis. These capacities can be carried by a single, relatively large DM or distributed among multiple small DMs.
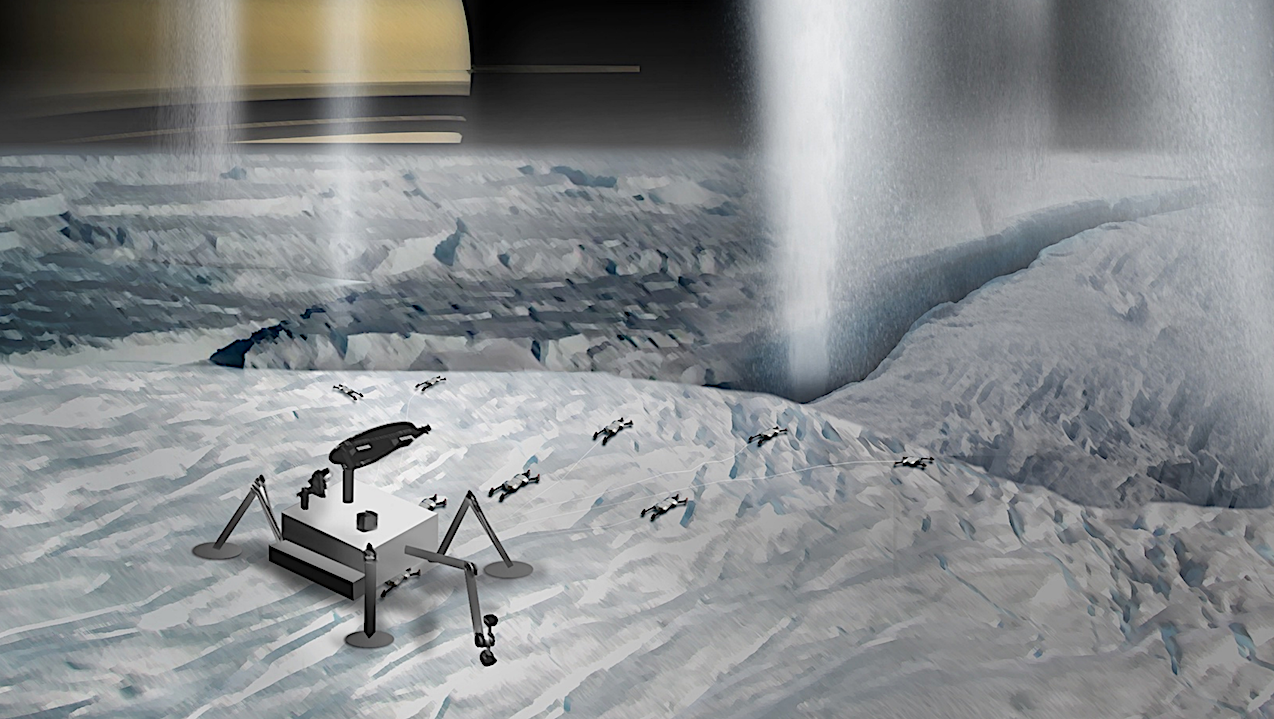
Graphic depiction of the Enceladus Vent Explorer: Phase II concept. Credits: Masahiro Ono
The Phase I study had two major focuses: vent conditions and system trade analysis. Regarding the former, we concluded that there are two possible eruption scenarios: relatively calm “boiling” models, in which a semi-static liquid interface boils into a conduit and/ or space to fuel the plumes, and the more dynamic “cryovolcanic” models, in which materials ascent coupled and change phase within the negative pressure gradient.
We created a 1-D thermo-fluidic model of the vent and obtained the worst-case dynamic pressure as well as the vent width. The Phase I system trade analysis concluded that DMs must have 2-D vertical mobility, where power and communication link are provided by SM through a tether. A point design of DM was developed, which has four 5-DOF limbs with ice screw end effectors.
We performed ice chamber experiments, computational fluid dynamics studies, and finite element analysis to estimate the performance of this point design. As a result, we concluded that this point design is feasible in the boiling eruption scenario, while the feasibility is undetermined under the cryovolcanic scenario due to a wide range of possible dynamic pressure (10^3 – 10^7 Pa).
The Phase II study will consist of four tasks. In Task 1, we refine the vent condition analysis through improved numerical and experimental studies, in the hope of obtaining tighter worst-case bounds. In Task 2 we will explore a broader trade space in vertical mobility, with particular emphasis on the anchoring mechanism and mobility architecture.
We will include newly emerged technical concepts such as sublimination anchor and snakebot. Task 3 investigates the software aspects. Specifically, trade studies on 1) multirobot systems and 2) subsurface autonomy will be performed, based on recent developments from JPL’s entry to DARPA Subterrainan (SubT) Challenge. In Task 4 we will perform two sets of system trade studies for the two distinct eruption scenarios.
We will first define science goals for each scenario, develop Science Traceability Matrices, and identify the Level 1 Science Requirements. Then we will break down the Level 1 requirements based on results from Tasks 2 and 3 to identify Level 2 Engineering requirements. Finally, the Level 2 requirements will be translated into Technology Roadmap by identifying technology gaps.
Should EVE be realized, it could enable not only the direct confirmation of extraterrestrial life but also the characterization of it. Comparative study of lives on different worlds would provide clues to the genesis of life. EVE is not merely a mission to an Enceladus vent, but to the secret of life.
Enceladus Vent Explorer Concept NIAC technical description)
Our concept, Enceladus Vent Explorer (EVE), is a robotic pathfinder mission to enter these doors. EVE’s goals are to descend into erupting conduits up to ~2km deep, characterize the unknown interior structure of the vent-conduit system, assess the accessibility to the subsurface ocean through the vent-conduit system, potentially reach the liquid interface, and perform astrobiology and volcanology observations in the vent-conduit system. EVE sends two types of modules: Surface Module (SM) and Descent Module (DM). SM is a lander that stays on the surface, while tens of small (~3 kg, 10 cm in width and 30 cm in length) DMs separate from SM, move to a vent, and descend into it. DMs rely on a power and communication link provided by SM through a cable. As the payload volume of DM is extremely limited, each DM can carry only a single miniaturized instrument. This limitation is complemented by heterogeneity. There are several types of DMs, all of which share the common mobility system but carry different instruments. For example, a “scout DM” creates a 3- D map of the geyser system with its stereo cameras and structured light. A “sample return DM” collects particles and ice cores in the vent and deliver them to the mass spectrometer in the SM. An “in-situ science DM” carries science instruments, such as a microscopic imager and a microfluidics chip for biosignature detection. DMs are sent either sequentially or in parallel.
Astrobiology