Away Team Droid Tech: Human-Robot Interface for Teleoperated Robotized Planetary Sample Collection and Assembly
As human space exploration evolves toward longer voyages farther from our home planet, in-situ resource utilization (ISRU) becomes increasingly important. Haptic teleoperations are one of the technologies by which such activities can be carried out remotely by humans, whose expertise is still necessary for complex activities.
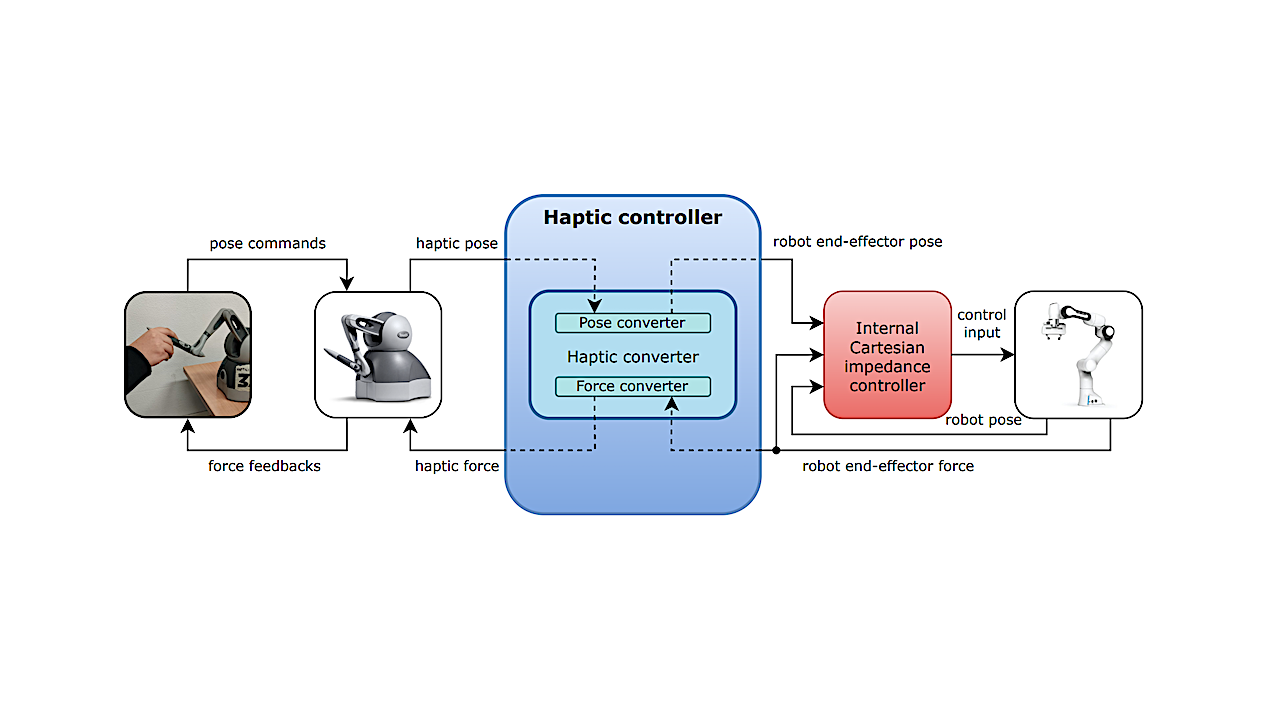
In order to perform precision tasks with effectiveness, the operator must experience ease of use and accuracy. The same features are demanded to reduce the complexity of the training procedures and the associated learning time for operators without a specific background in robotic teleoperations. Haptic teleoperation systems, that allow for a natural feeling of forces, need to cope with the trade-off between accurate movements and workspace extension.
Clearly, both of them are required for typical ISRU tasks. In this work, we develop a new concept of operations and suitable human-robot interfaces to achieve sample collection and assembly with ease of use and accuracy. In the proposed operational concept, the teleoperation space is extended by executing automated trajectories, offline planned at the control station.
In three different experimental scenarios, we validate the end-to-end system involving the control station and the robotic asset, by assessing the contribution of haptics to mission success, the system robustness to consistent delays, and the ease of training new operators.
Lorenzo Pagliara, Vincenzo Petrone, Enrico Ferrentino, Pasquale Chiacchio
Subjects: Robotics (cs.RO); Human-Computer Interaction (cs.HC); Systems and Control (eess.SY)
Cite as: arXiv:2406.08946 [cs.RO] (or arXiv:2406.08946v1 [cs.RO] for this version)
https://doi.org/10.48550/arXiv.2406.08946
Focus to learn more
Journal reference: 2023 IEEE 10th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Milan, Italy, 2023, pp. 171-176
Related DOI:
https://doi.org/10.1109/MetroAeroSpace57412.2023.10189984
Focus to learn more
Submission history
From: Enrico Ferrentino
[v1] Thu, 13 Jun 2024 09:17:10 UTC (18,542 KB)
https://arxiv.org/abs/2406.08946
Astrobiology,