Away Team Deep-Sea Datasets: Long-Term Visual Localization Of The Eiffel Tower Hydrothermal Vent
Visual localization plays an important role in the positioning and navigation of robotics systems within previously visited environments.
When visits occur over long periods of time, changes in the environment related to seasons or day-night cycles present a major challenge. Under water, the sources of variability are due to other factors such as water conditions or growth of marine organisms. Yet it remains a major obstacle and a much less studied one, partly due to the lack of data.
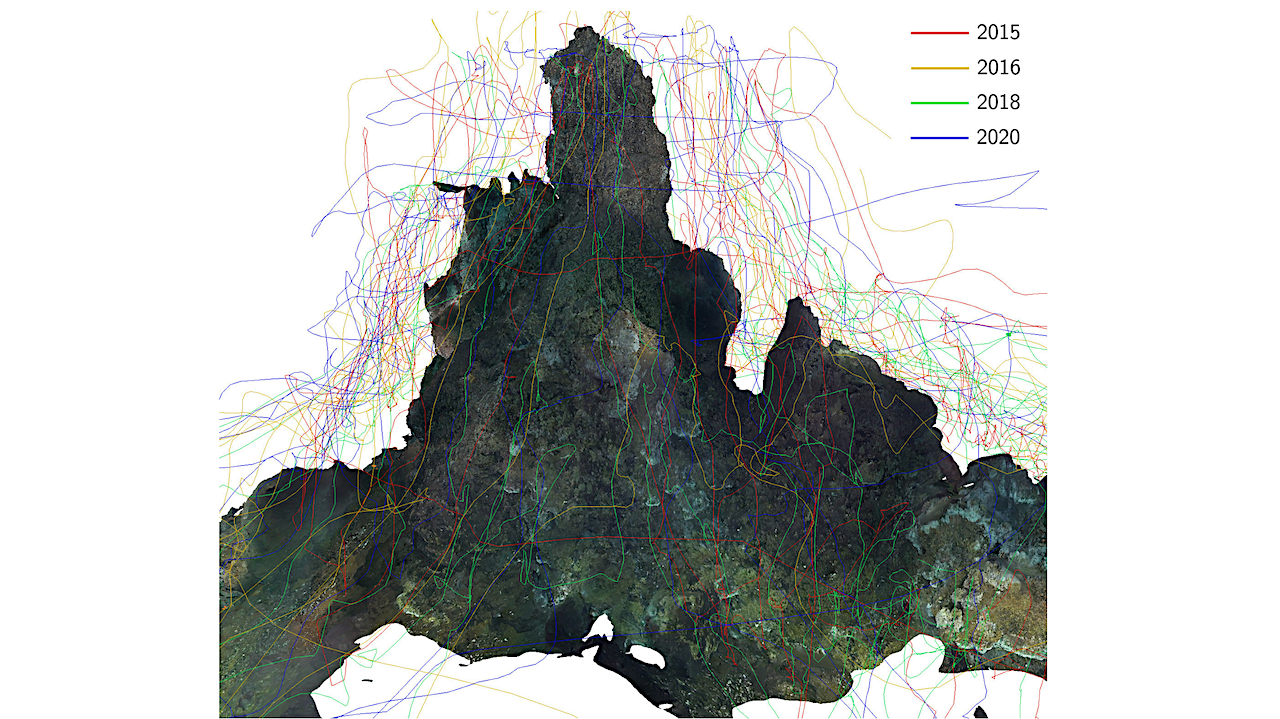
This paper presents a new deep-sea dataset to benchmark underwater long-term visual localization. The dataset is composed of images from four visits to the same hydrothermal vent edifice over the course of five years. Camera poses and a common geometry of the scene were estimated using navigation data and Structure-from-Motion.
This serves as a reference when evaluating visual localization techniques. An analysis of the data provides insights about the major changes observed throughout the years. Furthermore, several well-established visual localization methods are evaluated on the dataset, showing there is still room for improvement in underwater long-term visual localization. The data is made publicly available at this https URL.

Location of the Lucky Strike vent field on the Mid-Atlantic Ridge (Sources: Esri, GEBCO, NOAA, National Geographic, DeLorme, HERE, Geonames.org). — cs.CV

Evolution of the south-east facade of the vent. A growth in the mussels’ population significantly alters the visual aspect of the scene, making it difficult to match specific 2D points. — cs.CV

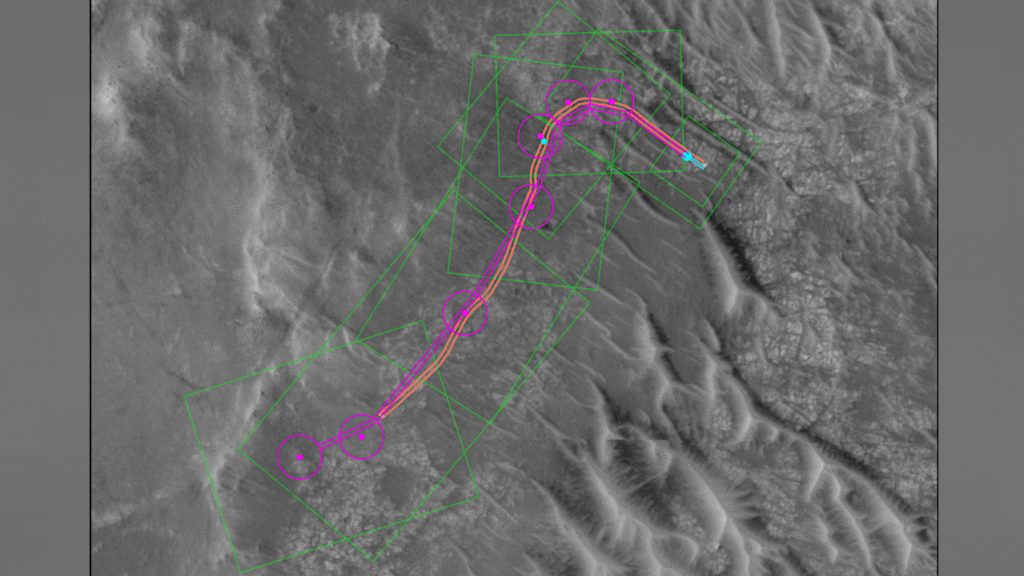
Illustration of a topological modification. The left image shows a point cloud distance between 2015 and 2020 models. We notice a piece from 2015 missing in 2020. This modification is visible on the right images. — cs.CV
Clémentin Boittiaux (IFREMER, COSMER, DYNI), Claire Dune (COSMER), Maxime Ferrera (IFREMER), Aurélien Arnaubec (IFREMER), Ricard Marxer (DYNI), Marjolaine Matabos (BEEP), Loïc Van Audenhaege (BEEP), Vincent Hugel (COSMER)
Comments: The International Journal of Robotics Research, In press
Subjects: Computer Vision and Pattern Recognition (cs.CV); Robotics (cs.RO)
Cite as: arXiv:2305.05301 [cs.CV] (or arXiv:2305.05301v1 [cs.CV] for this version)
https://doi.org/10.48550/arXiv.2305.05301
Focus to learn more
Related DOI:
https://doi.org/10.1177/02783649231177322
Focus to learn more
Submission history
From: Clementin Boittiaux [via CCSD proxy]
[v1] Tue, 9 May 2023 09:43:27 UTC (10,100 KB)
https://arxiv.org/abs/2305.05301
Astrobiology, oceanography,