Astrobiology Droids: Autonomous Robotic Arm Manipulation for Planetary Missions Using Causal Machine Learning
Autonomous robotic arm manipulators have the potential to make planetary exploration and in-situ resource utilization missions more time efficient and productive, as the manipulator can handle the objects itself and perform goal-specific actions.
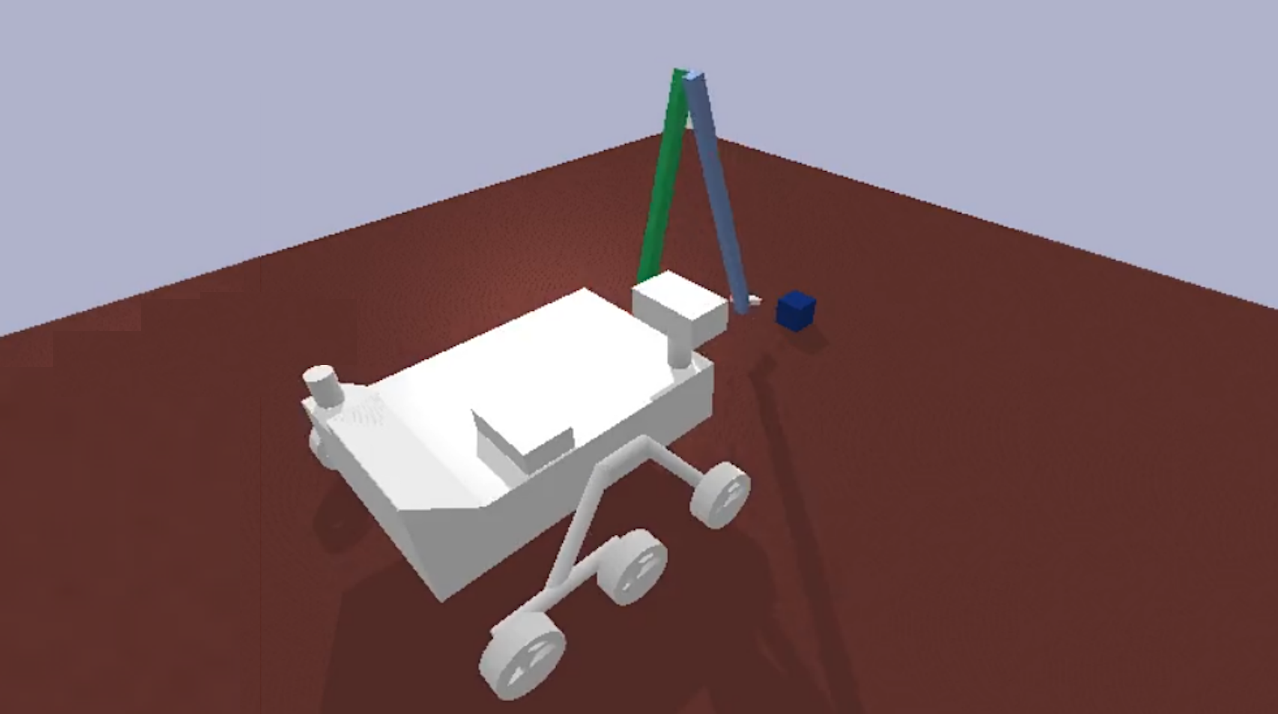
We train a manipulator to autonomously study objects of which it has no prior knowledge, such as planetary rocks. This is achieved using causal machine learning in a simulated planetary environment. Here, the manipulator interacts with objects, and classifies them based on differing causal factors.
These are parameters, such as mass or friction coefficient, that causally determine the outcomes of its interactions. Through reinforcement learning, the manipulator learns to interact in ways that reveal the underlying causal factors.
We show that this method works even without any prior knowledge of the objects, or any previously-collected training data. We carry out the training in planetary exploration conditions, with realistic manipulator models.
C. McDonnell, M. Arana-Catania, S. Upadhyay
Comments: 8 pages, ASTRA 2023: 17th Symposium on Advanced Space Technologies in Robotics and Automation, 18-20 October 2023, Leiden, The Netherlands
Subjects: Instrumentation and Methods for Astrophysics (astro-ph.IM); Earth and Planetary Astrophysics (astro-ph.EP); Machine Learning (cs.LG); Robotics (cs.RO)
Cite as: arXiv:2403.00470 [astro-ph.IM] (or arXiv:2403.00470v1 [astro-ph.IM] for this version)
Submission history
From: Miguel Arana-Catania
[v1] Fri, 1 Mar 2024 11:54:25 UTC (690 KB)
https://arxiv.org/abs/2403.00470
astrobiology