Testing Hardware For Potential Future Astrobiology Mission Landing On Europa
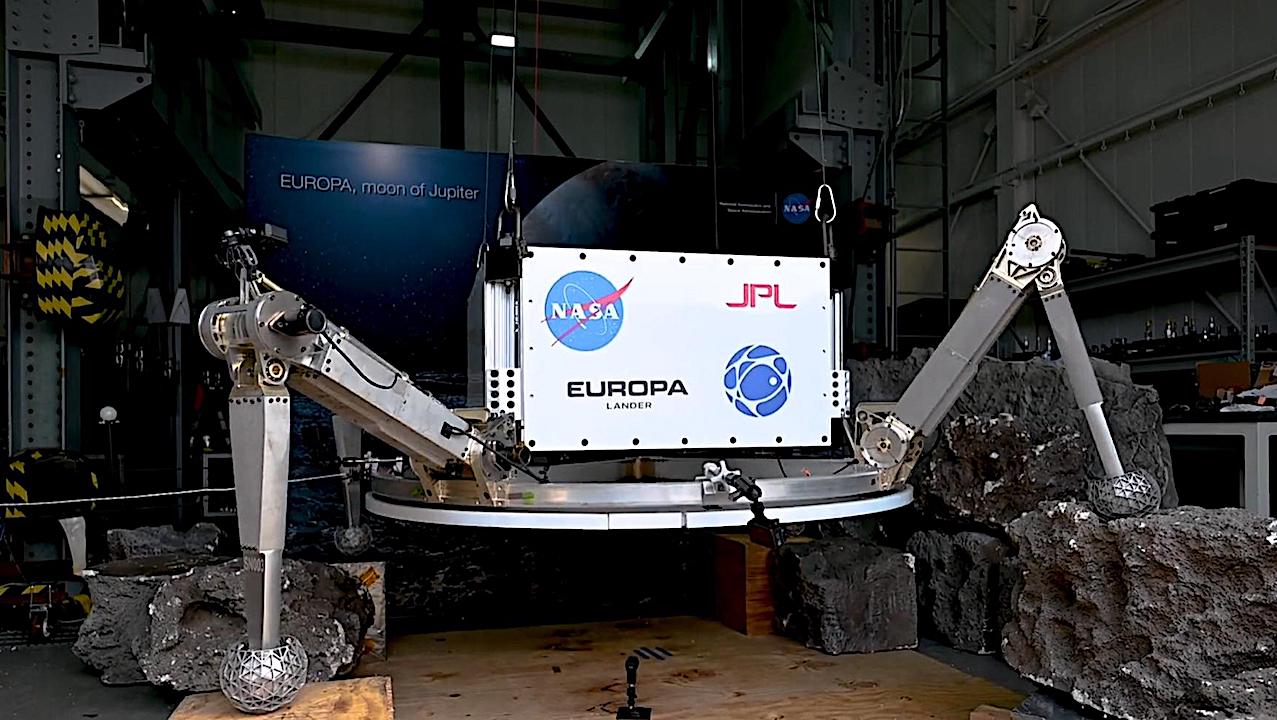
On Aug. 17 and 18, 2023, engineers at NASA’s Jet Propulsion Laboratory in Southern California tested the landing system for a proposed future mission that would touch down on Jupiter’s icy moon Europa. This system for the proposed Europa Lander is an evolution of hardware used on previous NASA lander missions. It includes the architecture used for the “sky crane maneuver” that helped lower NASA’s Curiosity and Perseverance rovers onto the Martian surface, which would give the lander the stability it needs during touchdown. Although this landing architecture was developed with Europa as the target, it could be adapted for use at other moons and celestial bodies with challenging terrain.
The following is depicted in video clips; some clips were slowed to half speed and others were sped up two to 150 times:
Four bridles, suspended from an overhead simulated propulsive descent stage, maintain a level lander body. The four legs conform passively to the terrain they encounter as the lander body continues to descend toward the surface. Each leg consists of a four-bar linkage mechanism that controls the leg’s pose before and during landing. The legs are preloaded downward with a constant force spring to help them rearrange and compress the surface they encounter prior to landing, giving them extra traction and stability during and after the landing event.
Acting like a skid plate, the belly pan provides the underside of the spacecraft with protection from potentially harmful terrain. The belly pan also resists shear motion on the terrain it interacts with. Once the belly pan contacts the surface, sensors trigger a mechanism that quickly locks the legs’ “hip” and “knee” rotary joints, resulting in a table-like stance. At this point, the job of ensuring lander stability shifts from the bridles to the legs. This shift keeps the lander level after the bridles are unloaded.
In the event the belly pan does not encounter terrain during the touchdown process, sensors in each leg can also declare touchdown. After the leg joints lock, the belly pan would be suspended above the landed terrain, and the lander would be supported only by the four legs.
Not pictured in the video is the period after the bridles are offloaded and flyaway is commanded. The bridles would then be cut, and the hovering propulsive stage would fly away, leaving the lander in a stable stance on the surface.
A division of Caltech, NASA’s Jet Propulsion Laboratory in Southern California manages the landing technology development of the proposed Europa Lander mission.
Image Credit: NASA/JPL-Caltech
Image Addition Date: 2023-11-15
Larger image
On Aug. 17 and 18, 2023, engineers at NASA’s Jet Propulsion Laboratory in Southern California tested the landing system for a proposed future mission that would touch down on Jupiter’s icy moon Europa. This system for the proposed Europa Lander is an evolution of hardware used on previous NASA lander missions. It includes the architecture used for the “sky crane maneuver” that helped lower NASA’s Curiosity and Perseverance rovers onto the Martian surface, which would give the lander the stability it needs during touchdown. Although this landing architecture was developed with Europa as the target, it could be adapted for use at other moons and celestial bodies with challenging terrain.
The following is depicted in video clips; some clips were slowed to half speed and others were sped up two to 150 times:
Four bridles, suspended from an overhead simulated propulsive descent stage, maintain a level lander body. The four legs conform passively to the terrain they encounter as the lander body continues to descend toward the surface. Each leg consists of a four-bar linkage mechanism that controls the leg’s pose before and during landing. The legs are preloaded downward with a constant force spring to help them rearrange and compress the surface they encounter prior to landing, giving them extra traction and stability during and after the landing event.
Acting like a skid plate, the belly pan provides the underside of the spacecraft with protection from potentially harmful terrain. The belly pan also resists shear motion on the terrain it interacts with. Once the belly pan contacts the surface, sensors trigger a mechanism that quickly locks the legs’ “hip” and “knee” rotary joints, resulting in a table-like stance. At this point, the job of ensuring lander stability shifts from the bridles to the legs. This shift keeps the lander level after the bridles are unloaded.
In the event the belly pan does not encounter terrain during the touchdown process, sensors in each leg can also declare touchdown. After the leg joints lock, the belly pan would be suspended above the landed terrain, and the lander would be supported only by the four legs.
Not pictured in the video is the period after the bridles are offloaded and flyaway is commanded. The bridles would then be cut, and the hovering propulsive stage would fly away, leaving the lander in a stable stance on the surface.
A division of Caltech, NASA’s Jet Propulsion Laboratory in Southern California manages the landing technology development of the proposed Europa Lander mission.
Credit: NASA/JPL-Caltech
Astrobiology